Однажды принесли 120мм вентилятор SUNON KDE1212PMB1… Вентилятор довольно специфический (мощный), а прибор довольно критичный к обдуву — в магазинах аналогичного такого не нашлось — попросили попробовать реанимировать.

На наклейке написано 6.8 ватт… Забегая наперед — китайский мультиметр намерял при работающем агрегате потребляемый ток более полу ампера, что похоже примерно соответствует заявленной мощности.
Жалоба собственно — не стартует, дергается, притом в разные стороны. Имея некоторые теоретические познания о работе бесколлекторных двигателей постоянного тока (а именно такой тип двигателей применяется в чуть менее чем всех кулерах), решил попробовать разобраться…
О снятии стопорной шайбы с оси крыльчатки с кольцевым магнитом писать не буду — процедура известна наверное каждому, кто когда-нибудь пытался почистить/смазать гудящий вентилятор любимого компьютера. Перейду сразу к «препарированию».
Подобрав из подручных средств подходящие приспособления, выбил из пластмассового основания вентилятора механизм со статором и платой управления… На фото пластмассового основания виден типа цилиндр из лепестков — был приятно удивлен — конструкция позволила разобрать узел без необратимых последствий.

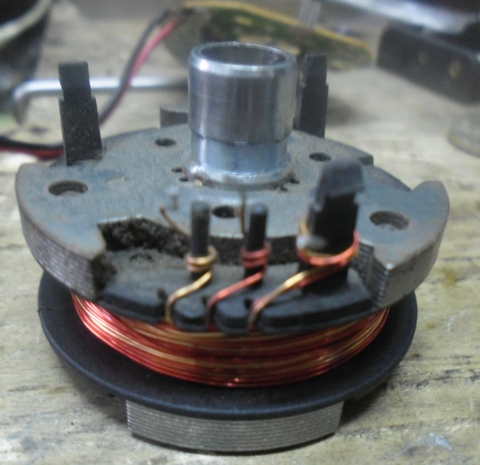
А это вид «в профиль» основной части — статора с обмотками, платы управления, а прямо на нас смотрит важный элемент — датчик Холла, дающий сигнал о положении ротора.

Вот вид на плату со стороны основных компонентов — тот факт что блок собран на дискретных компонентах, только подогрел интерес:
Итак, видны…. Два N-канальных ключа 3055E (8А 60В), затворы которых через резисторы-«нулёвки» подключены к микросхеме с маркировкой 6406, являющейся центральным управляющим компонентом.
Даташит (полное название SK6406) называет её «2-phase dc-fan motor pre-driver ic». Среди функционала — motor lock protection, auto-restart, rotation detection signal output.
Пинаут:
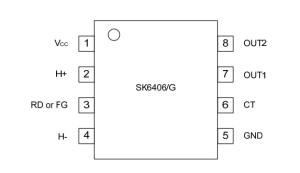
Выводы H+ и H- — входы дифф. усилителя сигнала с датчика холла, OUT1 и OUT2 — выходы управления затворами транзисторов, коммутирующих ток в обмотках статора. CT — подключаемый сюда конденсатор определяет периодичность попыток старта вентилятора. Вывод RD или FG (есть два варианта микросхемы) есть линией сигнала, показывающего либо заблокированность вентилятора, либо сигнала пропорционального частоте вращения. В данном экземпляре вентилятора сигнал не использован, хотя на печатной плате видна разводка под него.
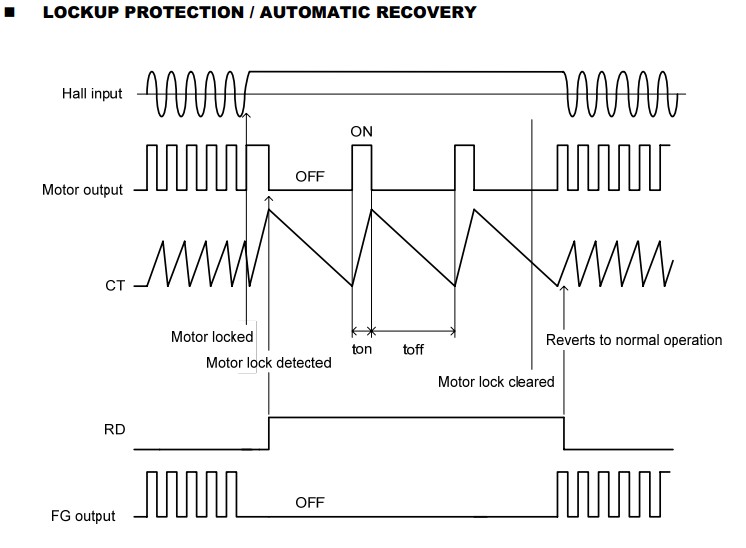
Диаграмма поясняет поведение микросхемы:
В даташите также приведена типовая схема включения, реальная схема ей практически соответствует. Нет правда диодов — вернее их роль выполняют встроенные в ключи диоды.

(Снизу платы правда есть диод 1N4002 — стоит в линии питания и можно сказать защищает от переполюсовки… Также снизу есть размещенный по схеме после диода небольшой электролитический конденсатор 4.7Мкф 63V , в качестве фильтра питания.)
Резистор R1 (позиционное обозначение по схеме из даташита) на плате 1K (маркировка 102), R2 — 100 Ом (101). Сама микросхема драйвера запитана через резистор 510 Ом (маркировка 511)
Так выглядит статор с обмотками. Обмотки намотаны проводами разного цвета. Удобно.

Теперь, после ознакомления со схемой и устройством, перейдем к поиску неисправности. После подачи питания на плату наблюдаем импульсы на выводе OUT1 — через одну из обмоток идет ток, всё как по-настоящему, двигатель по-идее должен запуститься. По логике, далее должен следовать импульс на OUT2, потом снова OUT1 и т.д. Но для этого драйвер должен узнать что ротор провернулся. А дает ему такой сигнал датчик холла, подключенный к выводам H+ и H-.
Типов датчиков Холла есть несколько, информация о их принципах работы достаточно легко гуглится — вкратце выходной сигнал датчика зависит от наличия/изменения магнитного поля. Проследив печатные проводники данного датчика, становимся вольтметром на дифф. выход (H+ и H-, 1-й и 3-й вывод) и смотрим, поднося к датчику магнит. Получилось что при поднесении магнита одним полюсом — имеем пару десятков милливольт одной полярности, другим полюсом — дугой полярности. То есть датчик работает! (есть датчики с различными типами выходного сигнала, часто сигнал имеет TTL-уровень и одной полярности. Кстати, встречал информацию что у датчика такого типа как в этом двигателе в некотором роде «взаимозаменяемые» выводы — можно на 1 и 3 например подать питание — тогда выходом будет потенциал между 2 и 4. А можно как на плате — 2 и 4 питание — тогда 1 и 3 — сигнал. Не проверял данную информацию. В принципе незачем 🙂 Еще, в двигателях попроще часто в корпусе вместе с датчиком холла расположены и коммутаторы обмоток — вся схема тогда состоит из 4-хвыводного корпуса и собственно обмоток).
Поднося для проверки датчика магнит к нему — попутно замечаем появление импульсов на OUT2. То есть схема оказалась вполне работоспособна…. В итоге собираю, несколько подгибаю датчик поближе к магнитному кольцу — и «взлет»! Вентилятор работает, мощность впечатляющая, все счастливы. (так и не понял почему датчик перестал срабатывать — то ли механически «отогнулся», то ли магнит «подразмагнитился» …. В общем такое вот «вскрытие» получилось с неожиданным но позитивным финалом.
В каких случаях применяют бесколлекорные двигатели с датчиками, а в каких без датчиков? В чем их отличие?